November 2025 – December 2025
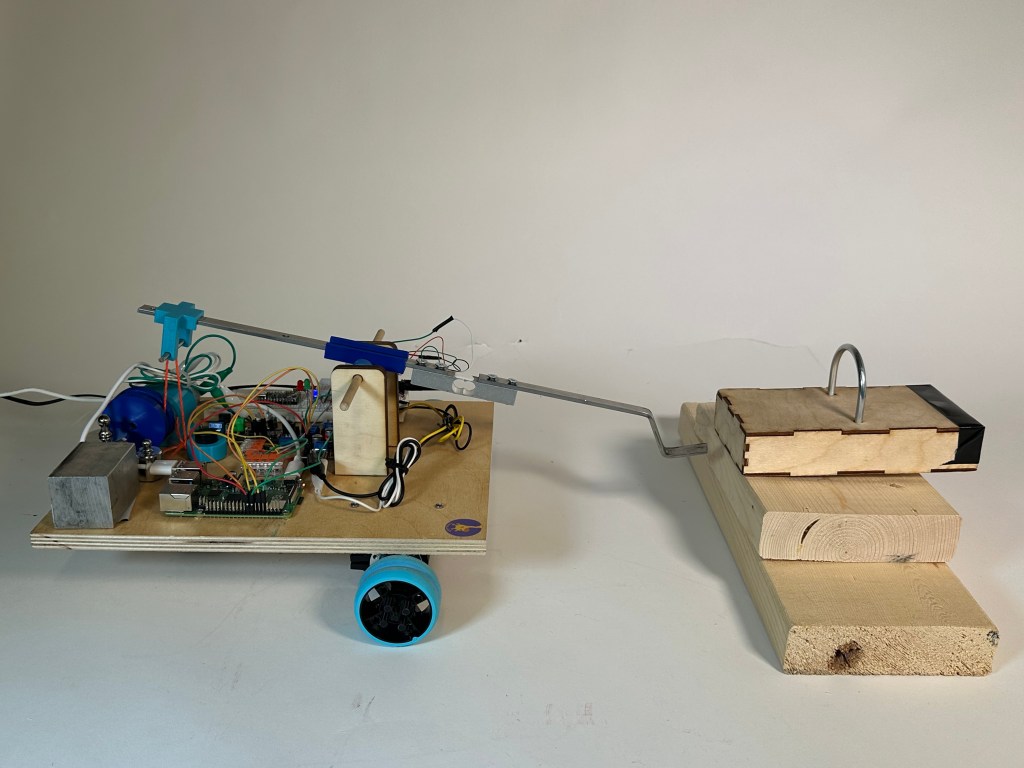
- Controlled through Raspberry Pi
- Created custom motor hubs to drive wheels
- Designed pulley lifting mechanism with steel arm
- Integrated H-Bridge Motor Control PCBs
- Received input from load cell to compare unknown weights
See a video of the robot in action here